要約
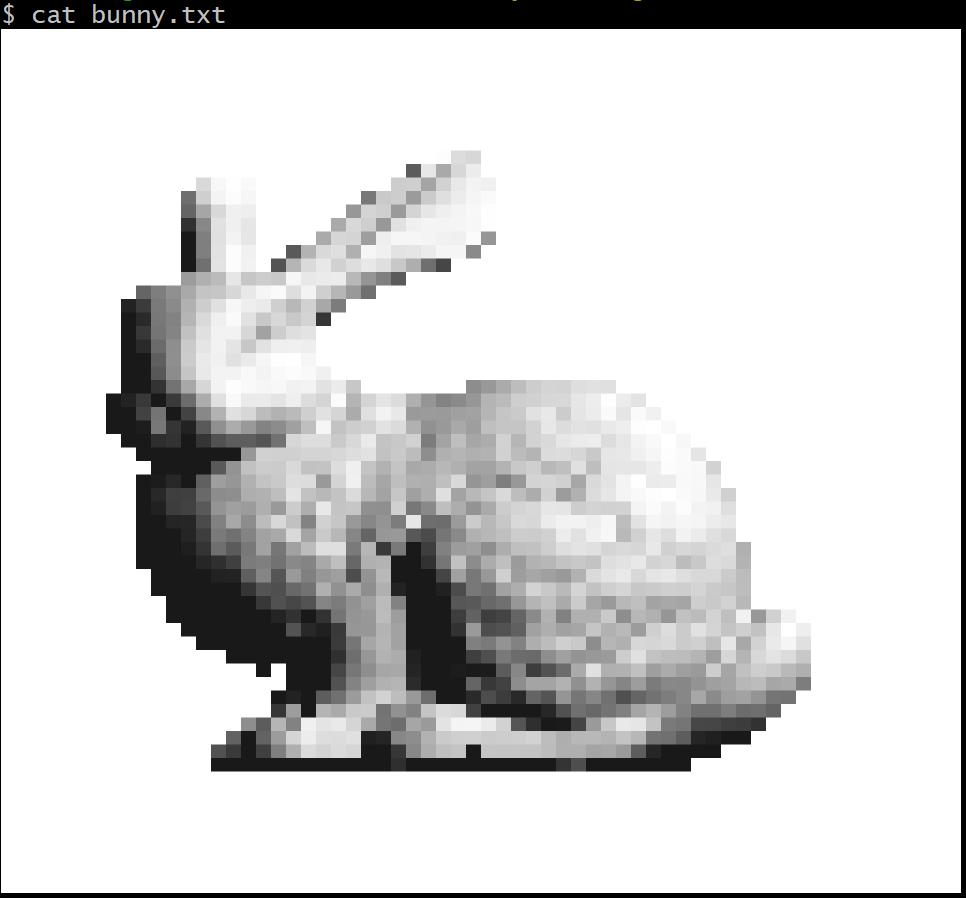
OBJファイルから読み込んだ三角形メッシュを、
レイトレーシングを利用してレンダリングするプログラムを作成した。
ナイーブな実装なので非常に低速。
kd-treeのようなデータ構造を使用すると高速になりそう。
プログラム

アルゴリズム
プログラム全体のアルゴリズムを簡単に説明する。
1. メッシュの正規化
メッシュの頂点群の境界球を求める。
ここでは、Ritterのアルゴリズムを用いる。
求めた境界球の中心と半径を用いて、
メッシュが単位球の内部に入るように正規化する。
2. レイトレーシング計算
出力画像の各画素の中心から ray を飛ばし、メッシュの色を計算する。
メッシュの全面と ray の交差判定を行い、
交差している面の中で視点に最も近い面を選択する。
(ここで kd-tree を用いると、探索する面を減らせる。)
その面の法線ベクトルを用いて、面の色を算出し、
出力画像の画素に反映する。
3. ray と三角形の交点
ここでは、交点を直接求めるわけではない。
三角形の各頂点ベクトル $\boldsymbol{a}, \boldsymbol{b}, \boldsymbol{c}$ と ray の支点ベクトル $\boldsymbol{p}$、方向ベクトル $\boldsymbol{d}$ から
交点の重心座標 $\boldsymbol{u}$ を計算する。
重心座標の定数倍 $k\cdot \boldsymbol{u}$ の各要素は、以下のような3x3行列の行列式を用いて計算できる。 $$ k\cdot u_1 = det(\boldsymbol{d}, \boldsymbol{b}-\boldsymbol{p}, \boldsymbol{c}-\boldsymbol{p}) $$ $$ k\cdot u_2 = det(\boldsymbol{d}, \boldsymbol{c}-\boldsymbol{p}, \boldsymbol{a}-\boldsymbol{p}) $$ $$ k\cdot u_3 = det(\boldsymbol{d}, \boldsymbol{a}-\boldsymbol{p}, \boldsymbol{b}-\boldsymbol{p}) $$
重心座標 $\boldsymbol{u}$ は各要素の総和が$1$となるようなものであるため、
$k = k\cdot u_1 + k\cdot u_2 + k\cdot u_3 $ で計算できる。
従って、$k\cdot \boldsymbol{u}$ を $k$ で割ることで重心座標が求められる。